
CANopen
This section explains CANopen.

Overview
CANopen is the specifications of a communication protocol and device profile. It was first released by a German organization, CAN in Automation in 2004. The physical layer and data link layer of this network were developed based on the controller area network (CAN), and there are many other CAN-based networks such as DeviceNet®, EtherCAT®, and EtherNet/IP®. CAN is commonly used to control vehicle engines, due to the high reliability of its communication.

Wiring Method and Communication Protocol
Wiring method
CANopen establishes an embedded system network, providing a communication speed of 1 Mbps. A single network can connect up to 127 nodes, and supports multiple masters. The physical layer and data link layer conform to the CAN specifications.
Communication protocol
CANopen uses the CAN protocol to transmit communication data to and from the application layer via the object dictionary. CANopen-compatible devices are delivered with a built-in object dictionary, which can be changed when the system is operated.
Using the object dictionary functions, each CANopen-compatible device can adjust its parameters, such as operation timing, during communication.
Characteristics
CANopen can establish a network system with multiple masters using a combination of the master/slave method and the producer/consumer method. The master/slave method is only used for communication timing adjustment and the producer/consumer method is used for regular data communication between devices. In the producer/consumer method, commands are sent between devices and the receiving side reads out data addressed to it in the order it is received. Unlike the command/response method, this method communicates without handshaking.
Producer/consumer method image
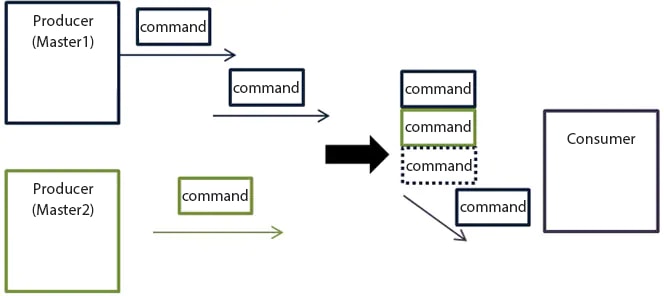
A consumer processes commands in the order they are received.
Networks using the CANopen protocol have been developed, with the most widely known one being EtherCAT®.
Related Networks
DeviceNet®
This is an RS-485-based network that supports CAN.
EtherCAT®
This is an Ethernet-based network that uses the CANopen protocol.
- Company, product, and network names mentioned on this page are either trademarks or registered trademarks of their respective companies.
- Note that some information, such as applicable standards and specifications, may have changed since this page was published.
November 2015

