Detection based on “Light”
What is a “position” recognition type laser sensor?
Outline
This type of sensor detects the position of a target. This is achieved by using a triangulation system or a time measurement system.
Principle and major types
Triangulation system
The change in the distance to the target affects the position of the light concentrated on the CMOS detecting element. This information is used for detecting the target position.
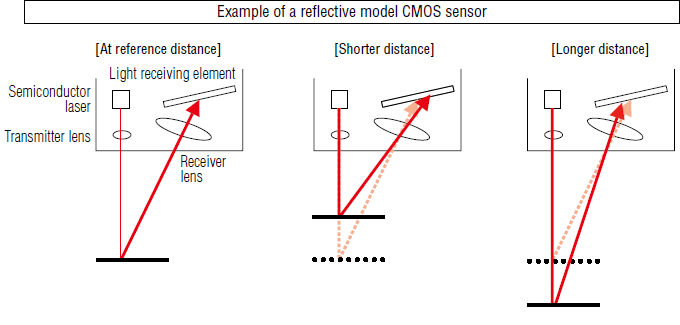
The laser emits a laser beam to the target as shown above. The light reflected off the target is concentrated by the receiver lens and forms an image on the light receiving element. When the distance changes, the concentrated light reflects at a different angle and the position of the image changes accordingly.
Time measurement system
The distance is measured based on the time in which the emitted laser beam returns to the sensor after hitting the target. The detection is unaffected by the surface condition of the target.
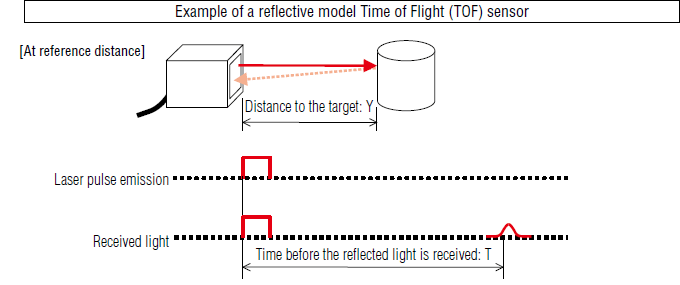
In the figure to the right, the sensor detects the time (T) that is the time until the reflected laser beam is received to calculate the distance (Y). The calculation formula is: 2Y (go-and-return distance) = C (light speed) × T (time before the reflected light is received)

-
Detection based on “Light”
Features and advantages of “received light” recognition type laser sensors
Laser Sensors: “Received light” recognition type -
Detection based on “Light”
Features of “position” recognition type laser sensors
Laser Sensors: “Position” recognition type



















