Detection based on “Camera Images”
What Are Vision Sensors?
This section provides a detailed look at vision sensors.

Outline

Vision sensors use images captured by a camera to determine presence, orientation, and accuracy of parts. These sensors differ from image inspection “systems” in that the camera, light, and controller are integrated together, which makes the unit’s installation and operation simple. There are differences between these sensors and other general-purpose sensors. For example, multi-point inspections can be done with a vision single sensor. In addition, thanks to the wide field of view, detection is possible even when the target position is not consistent.
- Find an Application
Principle and major types
Monochrome model
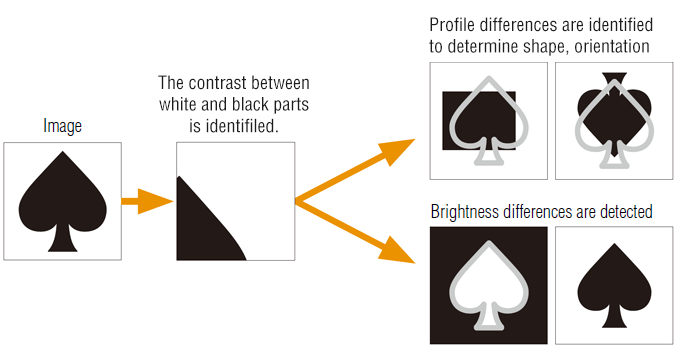
The image captured by the sensor head (camera) passes through the lens and is converted to an electrical signal by the light receiving element (which is a CMOS in the majority of cases). Then, the brightness and shape of the target is determined according to the brightness and intensity information from each pixel of the light receiving element.
Color model
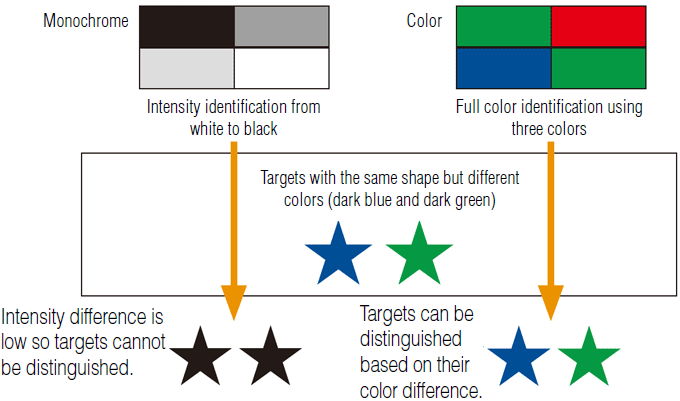
The light receiving element is a color type. Unlike the monochrome type, which identifies an intensity range between the extremes of white and black, the received light information is separated into three colors (RGB). Then, the intensity range of each of these colors is identified, which makes it possible to distinguish between targets even when their colors have minimal intensity differences.

Click here to learn more about the various inspections that can be performed.
-
Detection based on “Ultrasonic Waves”
Comparison between Ultrasonic Sensors and Optical Sensors
Ultrasonic Sensors -
Detection based on “Camera Images”
Features and Strengths of Vision Sensors
Vision Sensors




















