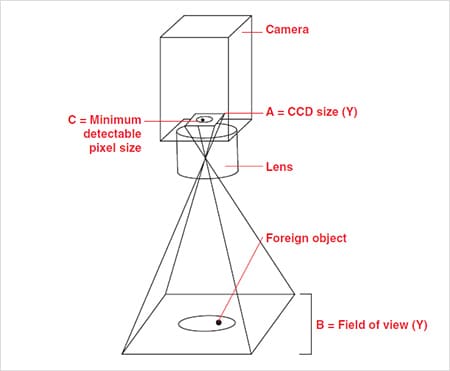
Concept of minimum detectable object size for defect inspection
Machine vision users are often concerned about finding the minimum detectable size of their defects or flaws. The following calculation will determine the machine vision system's minimum detectable flaw size:
A=CCD pixels in the Y direction of the camera
B=Field of view (Y direction) (mm)
C=Minimum detectable pixel size on the CCD (pixel)
Minimum detectable size= B×C÷A
Stain on a plastic workpiece
CONCEPT
In this example, the field of view (B) for capturing a target can vary between 10mm and 100mm, depending on the size of the lens selected for the application. The number of pixels of the CCD depends on the camera used. The number of pixels in the y-direction (A) of a standardsize 240,000-pixel CCD is 480 pixels, while that of a mega-pixel type 2 million-pixel CCD is 1200 pixels. The minimum detectable size(C) on a CCD is 1 pixel, but it may be better to specify 2-4 pixels for defect detection applications.
Let's estimate the minimum detectable size of defects using a megapixel camera with a 60 mm field of view (B). Assume that the minimum detectable pixel size (C) is an ideal value of 2 pixels. If we assign A = 1200 pixels, B = 60 mm, C = 2 pixels, to the previous formula,
Minimum detectable size= 60 × 2 ÷ 1200 = 0.1 mm
Settings for the inspection of continuously fed targets
Shutter speed
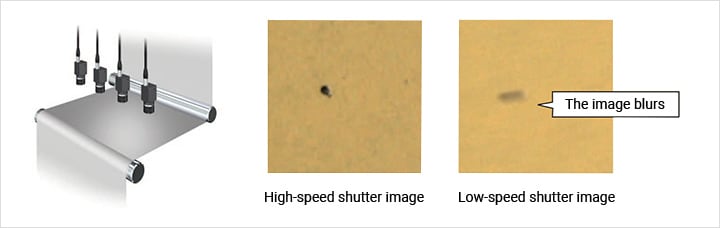
When targets travel within the field of view of a camera without stopping, the camera's shutter speed should be taken into consideration.
For example, if the shutter speed (exposure time) is not set fast enough when inspecting a continuous film/sheet, the captured image will blur. In order to prevent the blur, the shutter speed needs to be set so that the object travels no more than 1/5 its size while the image is being captured by the camera.
Shutter speed=Required minimum detectable size of defects÷5÷Line speed
Example) Required minimum detectable size of defects = 1 mm Line speed = 1 m /sec.
Shutter speed=1 mm÷5÷1000 mm/sec.=1/5000,The ideal shutter speed is 1/5000.
Maximum line speed
To determine the maximum speed a production line can travel for a particular inspection, you first need to calculate 2 items :
The maximum field of view of the camera (using the calculations on the previous page)
The processing time of the machine vision system, determined by testing the inspection conditions on the application targets
Once these items are found, you can apply them to the following calculation to determine Maximum Line Speed:
Maximum line speed=Field of view÷Image processing time
For example, when the required minimum detectable size of defects is 0.2 mm, based on the previous table the field of view can be up to 100 mm with a 2 million-pixel camera.
If the image processing time is 50 ms,Maximum line speed = 100 mm÷0.05 sec.=2000 mm / sec.If the line speed is less than 2 m/sec., targets can be detected without fail.
Minimum detectable object size
Although the minimum size from the CCD is one pixel, you need to make allowances and consider the minimum number of pixels that can be used to detect a target to be at least a 2 pixel square, even for high-contrast images. You might need to consider a 4 pixel square depending on the conditions.
Conversely, you can calculate the field of view from the minimum detectable object size. When the desired minimum detectable object size is 0.1 mm and the number of vertical pixels is 1200, the calculation formula is: Field of view=0.1(mm)÷2 pixels × 1200 pixels,The resulting field of view in the Y direction is 60 mm.
Supported line speed
[Intermittent feeding]
・Maximum number of inspections per minute = 60 seconds/Processing time of the machine vision system in seconds
・Processing speed required of the machine vision system (ms)=1 second/Desired number of inspections per second× 1000





![A Technical History of Image Processing Vol.1 [Camera]](/img/asset/AS_46814_L.jpg)
![The Latest Image Processing Applications [Transportation Industry]](/img/asset/AS_71759_L.jpg)

![The Latest Machine Vision Inspections [Food and Medical Industries]](/img/asset/AS_72814_L.jpg)