
EtherCAT®
This section explains EtherCAT®.

Overview
EtherCAT® is an Ethernet-based open network developed by a German company, Beckhoff Automation GmbH. Now, it is managed by the EtherCAT Technology Group (ETG).
EtherCAT® is characterized by highly efficient communication that uses the communication band effectively. This network can also be used as a motion control network because nodes are controlled to synchronize with each other by adjusting for the delay caused by time required for data transmission among nodes.

Wiring Method and Communication Protocol
Wiring method
The network environment can be built based on general-purpose Ethernet. Daisy chain wiring is generally recommended, but EtherCAT® also supports highly flexible topologies such as star, line, and ring. Up to 65535 nodes can be connected.
Communication protocol
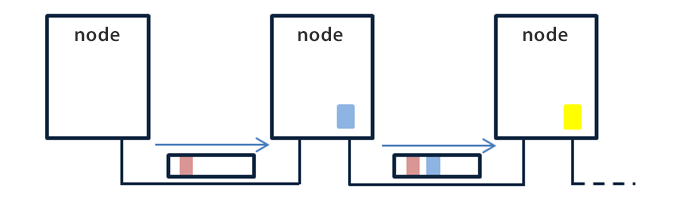
EtherCAT® uses the on-the-fly method and an area for use by each node is allocated in fixed-length packets. When the packet passes through one node, its information is added to the allocated area and the packet is then sent to the next node. This system reduces the number of packets passing through the network, making communication efficient.
Characteristics
EtherCAT® uses two communication methods: cyclic communication to send and receive data in a fixed cycle, and message communication to send and receive data at arbitrary timings. Cyclic communication has functions to maintain a fixed cycle, such as the distributed clock function that calculates delays in the network to synchronize inputs and outputs.
Process data object (PDO) communication function (cyclic communication function)
This function communicates with slaves simultaneously in a fixed cycle. The communication cycle is shared by all slaves. EtherCAT® uses the master/slave method, but communication can be performed by simply setting the number of nodes to connect and the communication cycle on the master because a data writing area is allocated for each node number.
Distributed clock
Using full-duplex Ethernet communication paths, EtherCAT® can build a ring network. Delays in communication paths can be calculated by sampling the time at which a packet passes through each device, which can be used to synchronize the start timing among devices with jitter of 1 μs or less.
Mailbox transmission function (message transmission function)
This transmission method performs one-to-one data communication from one node to another node at arbitrary timing. Communication packets for this function are embedded in the packets used for cyclic communication. This means that it takes two cycle periods from when data is transmitted until a response is sent back.
EtherCAT® also provides the Ethernet over EtherCAT (EoE) function, which communicates by encapsulating Ethernet packets in communication data, and the File over EtherCAT (FoE) function, which communicates by encapsulating file transfer packets in communication data.
- Company, product, and network names mentioned on this page are either trademarks or registered trademarks of their respective companies.
- Note that some information, such as applicable standards and specifications, may have changed since this page was published.
November 2015


