
MECHATROLINK-III
This section explains MECHATROLINK-III.

Overview
MECHATROLINK-III is an Ethernet based motion control network developed by YASKAWA Electric Corporation. Its specifications are managed by the Mechatrolink Members Association (MMA).
This network was developed based on MECHATROLINK-II with an Ethernet-based network, allowing for faster communication with improved commands.

Wiring Method and Communication Protocol
Wiring method
This network is wired based on general-purpose Ethernet. The maximum distance between stations is 100 m (328.1′). The transmission speed is 100 Mbps and the minimum link cycle is 31.25 μs. This network supports star type connections using special Ethernet switches in addition to bus connections, which allows slave devices to be removed for maintenance. Up to 62 slaves can be connected.
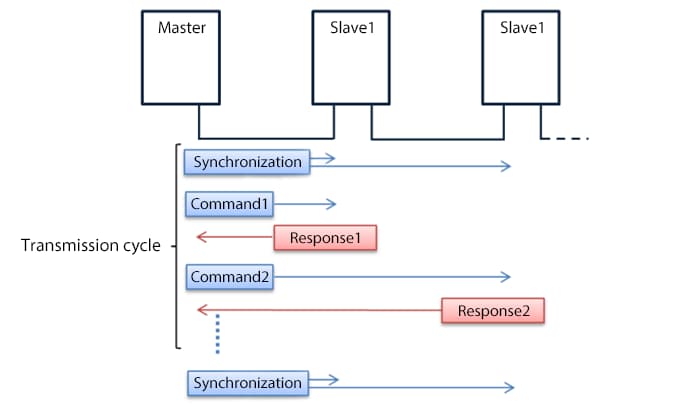
Communication protocol
Communication is performed using the master/slave method. The master communicates with slave devices by sending commands to and receiving responses from slaves in sequence. Received operation instructions are executed at synchronous timing in a transmission cycle.
Synchronous timing can be adjusted by calculating the delay caused by transmission time, which keeps synchronous timing jitter to 1 μs or less.
Characteristics
This network supports cyclic communication in which the master communicates with all slaves in a fixed cycle, message communication in which the master communicates with a specified slave at arbitrary timing, and event-driven communication in which the master reads out information on connected slave devices.
Cyclic communication function
With this function, the master communicates with all slaves in a fixed cycle. The communication cycle is shared by all slaves. Communication errors due to noise or similar causes are easy to prevent because the master retries within a communication cycle when it detects a communication error. Multiple settings, 8, 16, 32, 48, 64 bytes, are specified for the data length and multiple settings can be used together in cyclic communication.
Message communication function
With this communication method, the master performs one-to-one data communication with a specified slave at arbitrary timing.
In cyclic communication, up to 64-byte data can be sent and received. Additional data can be read out at arbitrary timing using message communication.
Event-driven communication function
In this communication, the master reads out information on connected slaves. The optimal communication settings can be configured without needing to first set up the slave in the master.
Related Networks
MECHATROLINK-II
This is a motion control network wired using RS-485.
- Company, product, and network names mentioned on this page are either trademarks or registered trademarks of their respective companies.
- Note that some information, such as applicable standards and specifications, may have changed since this page was published.
November 2015


