
Servo Motors
This page introduces KEYENCE’s lineup of servo motors in addition to the supported networks and connection examples.

Servo motor lineup
Servo motors


Connection example
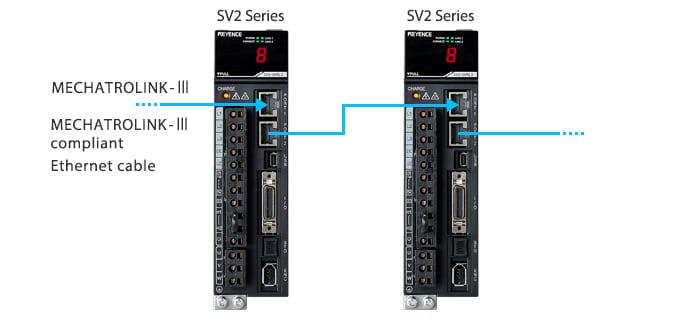
The communication ports on the front of the servo amplifier can be used for connecting dedicated cables.
Two MECHATROLINK interface ports are available on the SV2 Series for daisy-chain connections with multiple servo amplifiers. The RJ45 communication port connector can also be used for Ethernet cables that support MECHATROLINK-III.
Network example
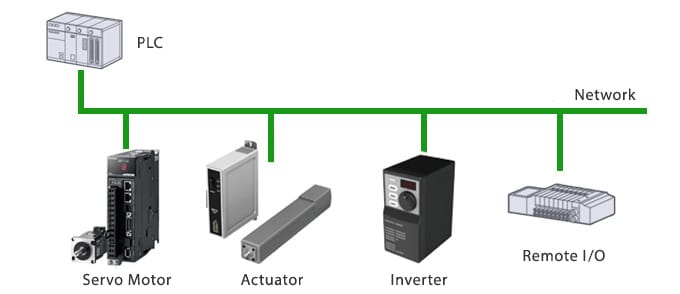
Actuators, remote I/O devices, and other network-compatible equipment can also be mixed and matched in addition to servo motors.
- A unit that supports the specific network will be required for the PLC.
Supported networks
| Series | Field network | Other communication functions | ||
|---|---|---|---|---|
| MECHATROLINK-III | MECHATROLINK-II | Ethernet TCP/IP |
RS-232C RS-422A/ 485 |
|
| Servo Motor SV2 Series |
Field network
✓
|
—
|
Other communication functions
—
|
—
|
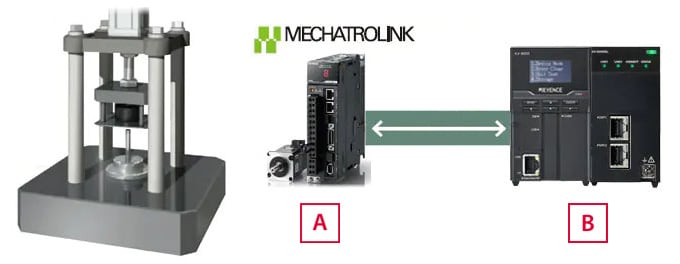
Typical connection example
Connecting to a network makes it possible to collect and manage various information from servo motors. This makes recovery possible simply by changing the motor amplifier should a problem arise.
The following example includes a KV-XH16ML positioning/motion unit connected to an SV2 Series device.
Improved quality through combined positioning and torque control
Controlling both position and torque in conventional systems meant adjusting the target coordinates and correcting for position deviations, making it extremely difficult to adjust the torque. Using a KV Series device makes it possible to improve both efficiency and quality thanks to continuous positioning control and torque control operations.
(Combined positioning and torque control)
SV2 Series AC servo motor
KV-XH16ML positioning/motion unit
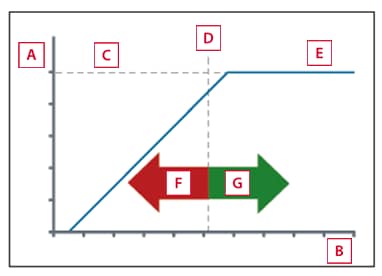
Coordinates
Time
Press-fitting OK line
Press-fitting point
Current coordinates
Positioning control
Torque control

