Usage Examples of CAN in Automobiles
This section introduces usage examples of CAN communication, including fault diagnosis via diagnostic communication and measurement/calibration via the CCP/XCP.
Expanding the range of use
A basic application of the serial communication protocol CAN, which was originally developed to be used for automobiles, is communication between electronic control units (ECUs). As it has already been explained how data is exchanged in Mechanism of CAN Data Communication, this section explains actual usage examples in automobiles.

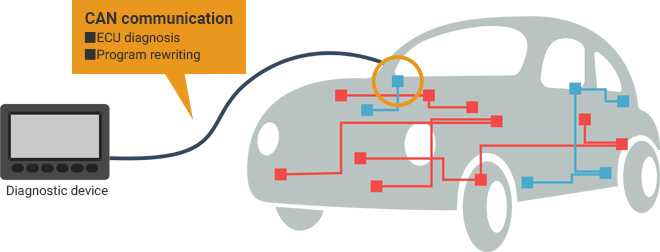
Fault diagnosis via diagnostic communication
Today’s automobiles use on-board networks via CAN communication to achieve ECU to ECU communication within the whole vehicle. The method of fault diagnosis using this data is called “diagnostic communication.” Although there are various ways to refer to this type of communication, such as “diagnostic data communication” and “fault diagnosis communication”), the term “diagnostic communication” is used throughout this section.
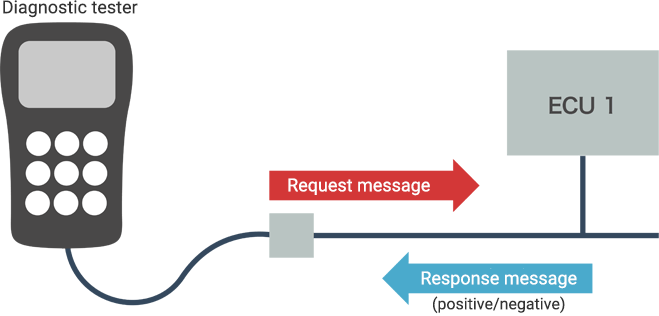
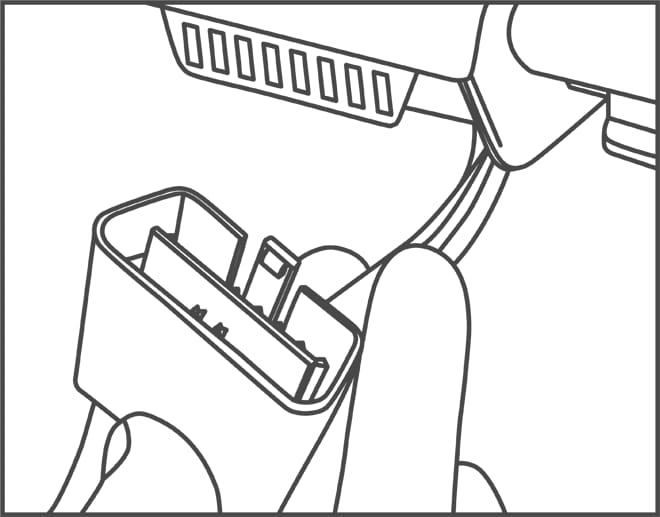
The basic principle of diagnostic communication is to connect a dedicated connector on a vehicle to a diagnostic tester, which then sends a request message to the ECU. In response, the ECU sends a “positive response message” as the result of its execution. If the ECU has failed in execution, it sends a “negative response message". Reception of this response with the diagnostic tester tells you information such as the fault position.
Standards of diagnostic connectors
CAN is now commonly used in modern automobiles, and the standardization of diagnostic connectors is also advancing. Although there are various ways to refer to these connectors such as “fault diagnostic connector”, “OBD connector”, “OBD-II connector”, and “DLC connector”, most of them are trapezoidal connectors stipulated in ISO 15031-3 or SAE J1962. Its mounting position in a vehicle is almost always found in the foot space under the driver’s seat.
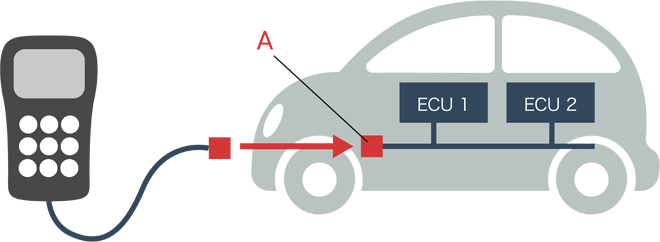
- A
- Diagnostic connector
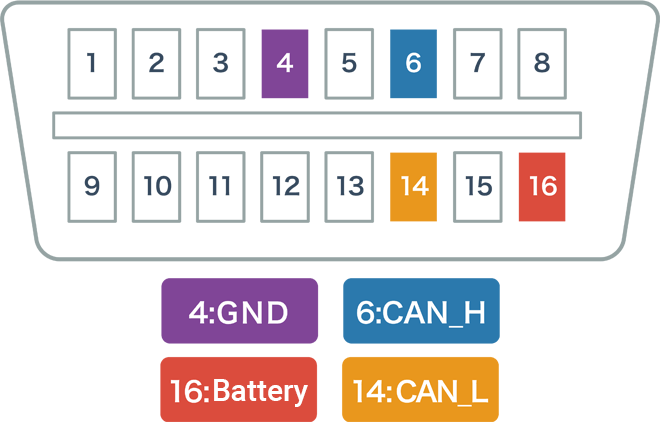
Generally, pins are arranged as follows, and vehicle information can be detected through diagnostic communication.
Calibration protocols “CCP” and “XCP”
The calibration process is necessary for control of not only vehicles, but also production and other machines. For today’s computerized automobiles, it is necessary to optimize the control as a whole by changing parameters on the basis of numeric values provided from various sensors. Protocols for accessing an ECU for this purpose are called “measurement & calibration protocols”, and the first one that came into existence was the CAN calibration protocol (CCP).
For today’s automobiles, measurement and calibration are becoming more important due to advanced control, and serial communication protocols other than CAN are now also used on some automobiles. In response to these situations, the “XCP” was developed as a measurement & calibration protocol that is compatible with different networks. The CCP and the XCP were standardized by an organization called the Association for Standardization of Automation and Measuring Systems (ASAM).
Advantages of the XCP
The XCP enables the same protocol to be used between different networks and supports measurement and calibration for all on-board ECUs. Other advantages are that it is based on the CCP and that it can be used freely thanks to its openness on the ASAM website. Furthermore, the XCP also enables the measurement and calibration processes to be synchronized with control.
