Pulse Measurement Glossary
KEYENCE is a factory automation (FA) manufacturer that offers various sensors and measuring instruments, and here we will provide easy-to-understand explanations of terms you should know when performing pulse measurement. If there are terms related to pulse measurement that you do not clearly understand, the following explanation will surely help you, regardless of whether you are new to pulse measurement or you have already installed an instrument.

Rotary encoder
A rotary encoder is an instrument that converts mechanical displacement due to rotation to pulse signals. Although this encoder was originally developed as a detector for rotation angle measurement, its applications have now been expanded to include servo motors that position robots and other devices. Rotary encoders are classified into two types according to the measurement method: “incremental” and “absolute.” With the incremental type, there are three types of pulse outputs from a rotary encoder: Z phase (a pulse is output per rotation), A phase, and B phase (which have different phases). An encoder that detects linear displacement is called a linear encoder.
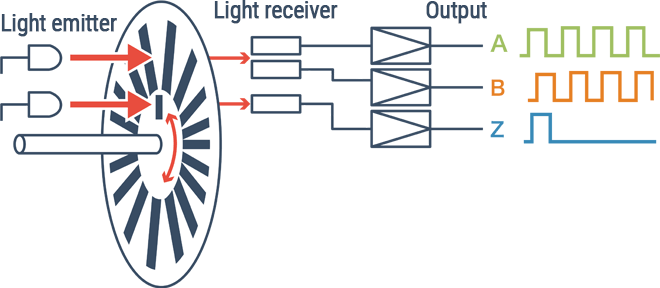

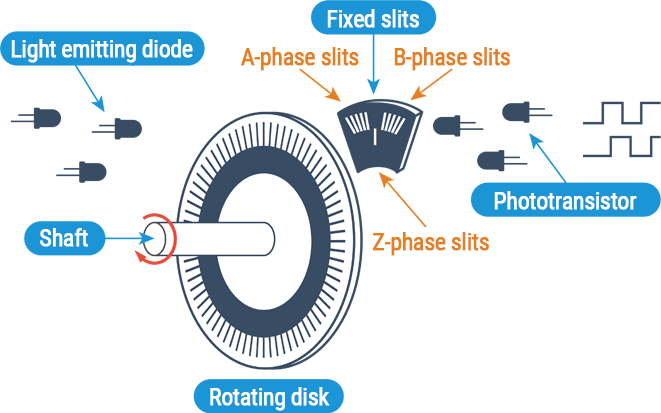
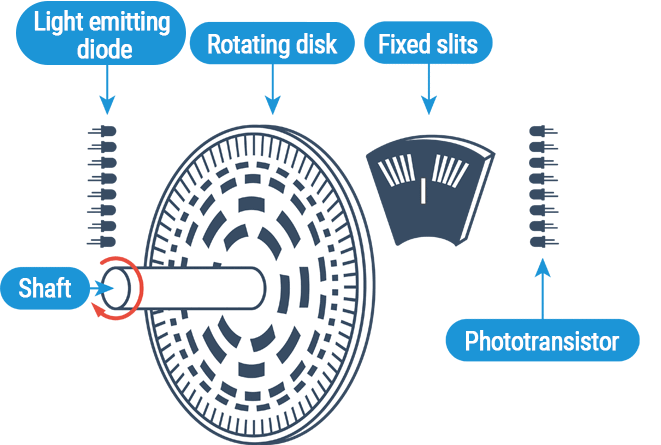
Incremental method
Windows are provided on the outer circumference of a slit disk and pulse signals are emitted in accordance with the turning on/off of the light that passes through the windows. This method features non-contact inspection of rotation and the capability to detect the rotation direction on the basis of the output timing from the A and B phases. Pulses are output only while the encoder is rotating.
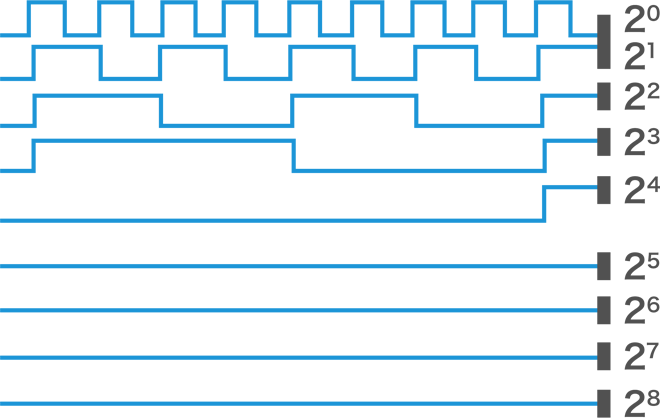
Absolute method
This method measures the absolute angle position of one or more rotations in relation to the origin. Different codes are assigned to the windows of the slit disk. Hence, respective code signals are output for the different codes. Although this method features high resistance to noise, the number of digits (the number of signal lines) needs to be increased to enhance the resolution. There are several code types such as gray code, binary code, and BCD code. Gray code is most commonly used.
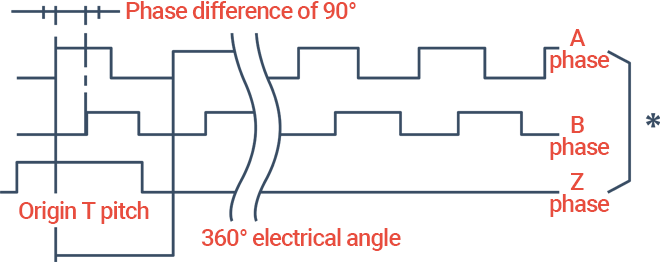
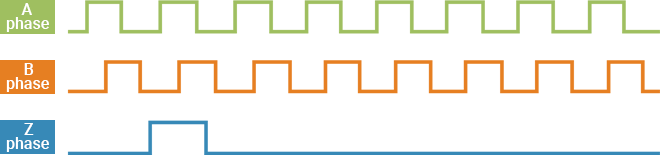
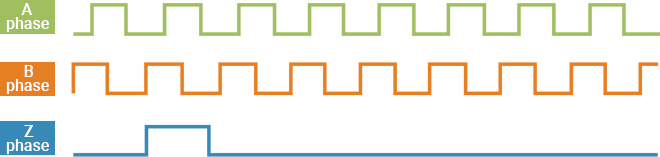
A phase, B phase, and Z phase
An incremental type rotary encoder emits one Z signal per rotation. This signal is used as the origin. Meanwhile, against A-phase pulses, B-phase pulses are output one quarter pulse cycle (90°) behind in the case of clockwise rotation. On the other hand, in the case of counterclockwise rotation, A-phase pulses are output one quarter pulse cycle behind B-phase pulses. The number of pulses varies depending on the resolution.
Resolution
For the incremental method, the resolution refers to the number of pulses output per rotation of a rotary encoder, whereas for the absolute method, it indicates the number of absolute addresses for an absolute type rotary encoder. Because the accuracy differs according to the resolution, it is necessary to select a rotary encoder having a resolution suited to your application and budget. A pulse measuring instrument (data logger) also has its own displayable resolution.
High level / low level
Pulse signals are expressed as “low level / high level” or “0/1.” For example, it is assumed that the low level (0) is a potential of 0 V, and the high level (1) is a potential of 5 V. They are measured as digital signals.
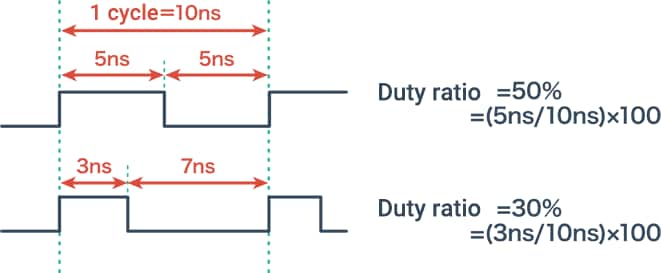
Duty ratio
The duty ratio is a ratio between the pulse signal cycle and the pulse duration and is expressed as shown below. This rate is an extremely important element in PWM control, which is used in motor control and similar operations.
D = τ/T
- D:
- Duty ratio
- τ:
- Pulse duration
- T:
- Cycle