
3D Vision-Guided Robotics
3D VGR series
3D Vision-Guided Robotics 3D VGR series
Unmatched Detection Capability and Ease of Use for Robot Bin Picking
Optimal hardware and algorithms for 3D Vision-Guided Robotics Systems.
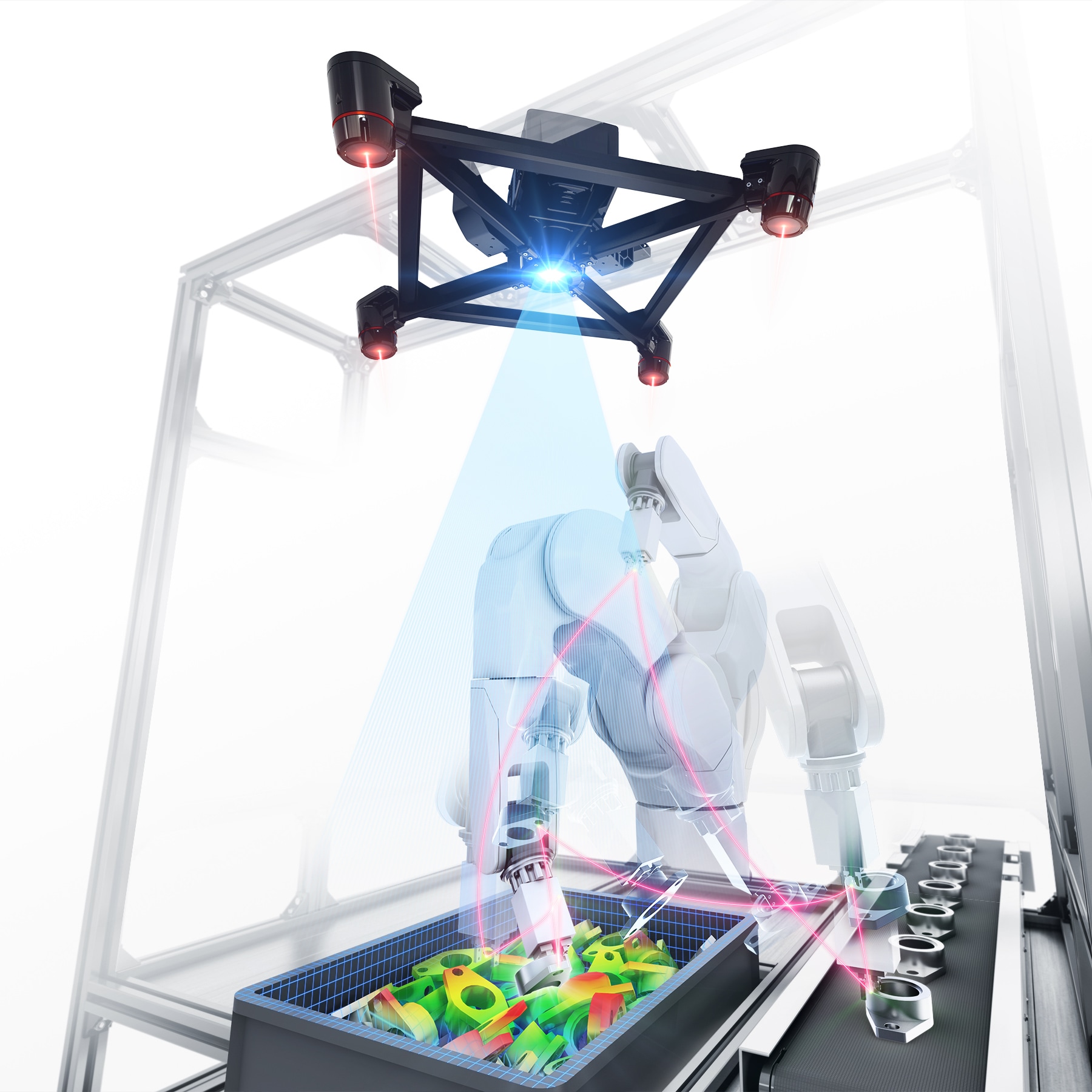
The 3D vision-guided robotics system from KEYENCE is designed for unparalleled object detection capability and ease-of-use. This system can be used in the automation of assembly, de-palletizing, and machine tending processes. To gather 3D data, the four-camera, one-projector imaging unit captures 136 total images as the high-speed projector emits multiple striped-light patterns across the target. The user follows a simple setup process, including automatic robot-camera calibration. CAD data of the part to be detected can be uploaded to further simplify the setup process. For each detected object, the Path Planning tool calculates a full path of robot motion to efficiently pick and move the part while avoiding all collisions with the bin or cell. This whole process can be simulated during the work cell design process, using the built-in Picking Simulator which allows users to test out different grippers or cell designs and simulate the picking results without installing or changing any physical hardware.
Features
Specially Designed Optical Systems and 3D Search Algorithms to Deliver High Precision and High Speed Performance
The optimum 3D image is obtained due to the 4-camera design, which can create an image free of blind spots. The newly-developed 3D search function for bin picking allows for the stable detection of targets regardless of position or orientation.
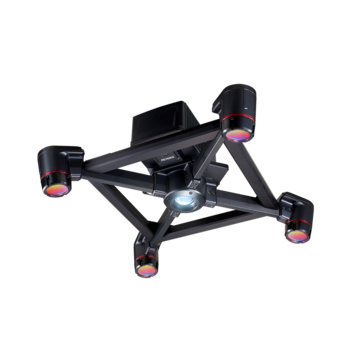
Integrated Design Comprised of Four Cameras and a Single Projector

Equipped with a Newly-Developed 3D Scanning Function

Automatically Calculate Movements for the Robot, Taking Peripheral Equipment and the Position of the Robot into Account
Path Planning Tool
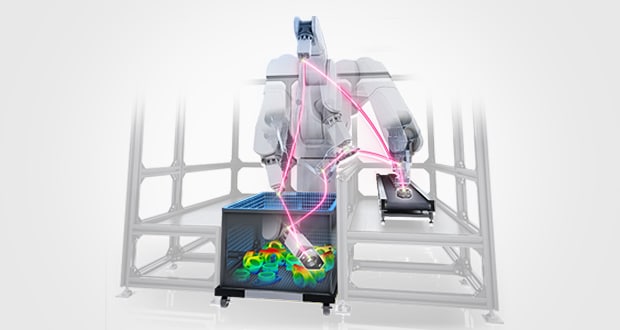
Automatic Robot Path Planning
Robot motion paths are automatically calculated to eliminate all collisions of the robot, target, and surroundings to greatly reduce robot programming time and to allow for uninterrupted bin picking operation.
Picking Simulator
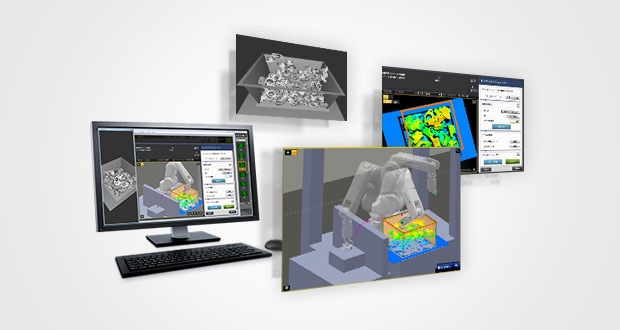
Worksite Modeling Simulation
The workcell and program can be designed in the Simulator before any physical setup is completed, which can identify potential setup problems and dramatically increase bin picking success rates.
